No GPS? No Problem! ANELLO’s Optical Gyroscope Puts You Back on the Map

At ANELLO Photonics, we’re revolutionizing navigation using silicon photonics. Our miniaturized optical gyroscope technology enables high-performance with the low size, weight, and power (SWaP) required for GPS-denied pedestrian and robotics applications.
ANELLO Technology Demo at Camp Ro berts
At the 2023 Institute of Navigation Joint Navigation Conference, I presented a paper on behalf of ANELLO Photonics demonstrating a navigation solution for dismounted soldiers and robots using our novel optical gyroscope technology and sensor fusion engine. This system enables a highly accurate solution in indoor and other GNSS-denied environments while maintaining the low size, weight, and power (SWaP) requirements for dismounted soldiers.
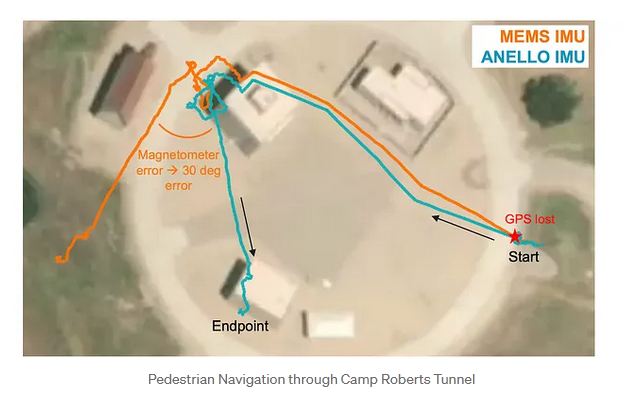
In May 2023, we attended JIFX at Camp Roberts in Paso Robles, CA along with Yotta Navigation. Camp Roberts has a training area called CACTF, Combined Arms Collective Training Facility, which includes an underground tunnel leading to the basement of a three story “hotel”. This was an ideal testing location as the tunnel was just large enough for a pedestrian to enter, and it completely blocked GPS signal once inside. A birds eye view of the tunnel path is shown below.

We tested two systems: the ANELLO evaluation kit (EVK) which has an optical gyro in the heading axis, and a standard MEMS IMU-based system typically used for pedestrian navigation.
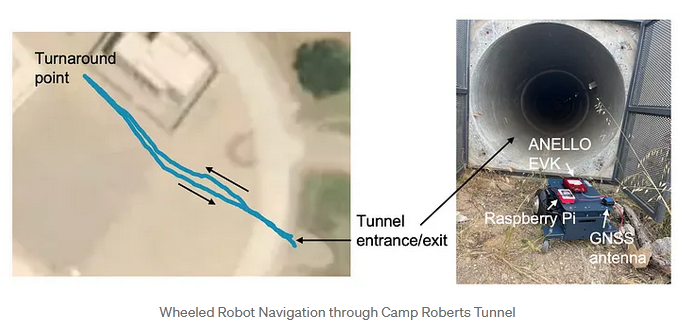
The EVK was strapped to the vest of the pedestrian, a Raspberry Pi was used to log data, and a portable battery was used for power. The EVK was mounted in an orientation such that when the pedestrian crouch walked through the tunnel, the optical gyro was mostly tracking the heading. In the pedestrian tests, Yotta Navigation’s machine learning-based gait detection was used as odometry to track distance traveled.

The system was initialized using GPS outside of the tunnel at the start of the test. From there, dead reckoning was performed as the pedestrian walked through the tunnel, up the stairs, and to the endpoint. The total distance of the test was around 180 meters.
The MEMS IMU case (orange) highlights two concerns: 1) The MEMS gyroscope has a high drift rate which leads to heading offsets, and 2) the solution relies heavily on magnetometers, which are notoriously sensitive to the external environment and lead to major reliability issues in attitude measurements. We see the IMU heading drift inside the tunnel, and then at the end of the tunnel, local distortions in the magnetic field cause a 30 deg heading error. The solution then continues on the incorrect heading until the end of the test, resulting in over 55m position error.
On the other hand, the ANELLO IMU (blue) accurately tracked the heading for the duration of the test using the optical gyroscope, without relying on any magnetometer input. By the end of the 180m GNSS-denied test, the position error was less than 3m.
We then tested a robotics use case in the same tunnel using our test robot, which fed wheel speed information into the EVK for odometry. This time, the robot drove to a turnaround point inside the tunnel and returned back to the start point, with a round trip distance of 95 meters and a total time of 15.5 minutes inside the tunnel. The ANELLO EVK successfully tracked position and attitude during the duration of the test, and the maximum error observed was 3m.
Finally, we simulate a scenario in complete absence of GNSS signal. Here, a position and heading is entered manually into the ANELLO EVK for initialization, and the wheeled robot performs an indoor mission completely GNSS-denied over 100 meters without GNSS signal.
After manual initialization, the robot drives indoors through the ANELLO office, and returns to the starting location with sub-1m position error. This corresponds to an error of less than 1% of total distance traveled, which is only possible due to ANELLO’s high-performance, low SWAP optical gyroscope technology.

How Do We Do It?
There are two key requirements to achieve reliable positioning in extended GNSS-denied environments: 1) an estimate of distance traveled, and 2) an accurate heading.
An accurate heading requires a high-performance, low-drift gyroscope typically found in fiber-optic gyros (FOGs) or ring laser gyros (RLGs). However, these sensors are notoriously bulky, heavy, power hungry, and expensive, making them unsuitable for pedestrian and small robotics applications. In contrast, MEMS-based gyros are smaller and cheaper, but suffer large noise and drift as well as performance degradation due to environmental factors such as vibration and thermal gradients.
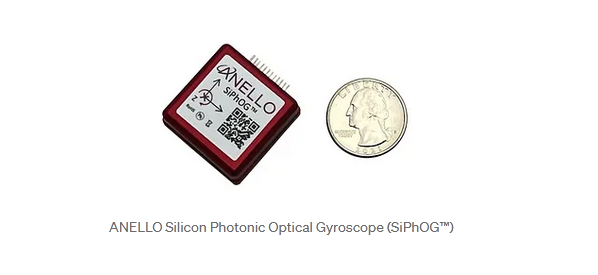
To combat the drawbacks of these two gyroscope technologies, ANELLO developed a silicon photonic optical gyroscope (SiPhOG™), as described in our recent blog. The SiPhOG provides a >10x reduction in size, weight, and power consumption compared to traditional optical gyros, as well as an order of magnitude performance improvement over typical MEMS sensors.
Distance traveled can be estimated using accelerometers and odometry. For wheeled robots with a fixed IMU mounting orientation, acceleration measurements are integrated to obtain speed, and wheel speed sensors are used to correct accelerometer bias during extended GNSS-denied periods. For pedestrians, accelerometers are used to detect pedestrian gait cycles which are then used to estimate distance traveled.
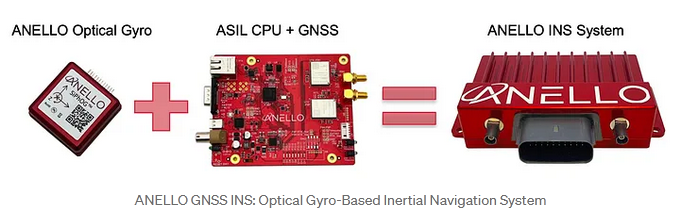
The ANELLO GNSS INS system features ANELLO’s high-performance optical gyro in the heading axis, along with triple-redundant 6-DOF MEMS IMUs for roll, pitch, and acceleration. It contains dual GNSS receivers, which can be utilized during times when reliable GNSS signal is available, and it also accepts odometer input. The on-board sensor fusion engine seamlessly tracks position even when GNSS is unavailable. The ANELLO EVK under test in this blog contains the same hardware as the GNSS INS system pictured below, but includes USB and ethernet interfaces for plug-and-play testing and evaluation.
Looking Ahead
The need is quickly growing for accurate navigation in extended GNSS-denied or GNSS-challenged scenarios such as canopy, indoors, or jamming and spoofing environments. ANELLO’s SiPhOG and sensor fusion engine enables the small form factor and high-performance GNSS-denied navigation for pedestrian and robot applications. This blog demonstrates that this technology can help solve crucial warfighter situational awareness challenges in indoor and dense urban combat environments, and the opportunities to extend this technology to other uses cases are endless.

To learn more about how ANELLO’s technology can help solve your navigation needs, get in touch with us at info@anellophotonics.com.
ANELLO seeks to drive a new revolution in inertial sensing with optical gyros using silicon photonics, which will allow many more applications to experience the optical gyroscope’s exquisite performance.